Global
Positioning System
Introduction
The Global Positioning System (GPS) is a burgeoning
technology, which provides unequalled accuracy and
flexibility of positioning for navigation, surveying and
GIS data capture. The GPS NAVSTAR (Navigation Satellite
timing and Ranging Global Positioning System) is a
satellite-based navigation, timing and positioning
system. The GPS provides continuous three-dimensional
positioning 24 hrs a day throughout the world. The
technology seems to be beneficiary to the GPS user
community in terms of obtaining accurate data upto about
100 meters for navigation, metre-level for mapping, and
down to millimetre level for geodetic positioning. The
GPS technology has tremendous amount of applications in
GIS data collection, surveying, and mapping.
Geopositioning -- Basic Concepts
By positioning we understand the determination of
stationary or moving objects. These can be determined as
follows:
-
In
relation to a well-defined coordinate system, usually by
three coordinate values and
-
In
relation to other point, taking one point as the origin
of a local coordinate system.
The first
mode of positioning is known as point positioning, the
second as relative positioning. If the object to be
positioned is stationary, we term it as static
positioning. When the object is moving, we call it
kinematic positioning. Usually, the static positioning is
used in surveying and the kinematic position in
navigation.
GPS -
Components and Basic Facts
The GPS uses satellites and computers to compute positions
anywhere on earth. The GPS is based on satellite ranging.
That means the position on the earth is determined by
measuring the distance from a group of satellites in
space. The basic principles behind GPS are really simple,
even though the system employs some of the most high-tech
equipment ever developed. In order to understand GPS
basics, the system can be categorized into:
FIVE logical Steps
-
Triangulation from the satellite is the basis of the
system.
-
To
triangulate, the GPS measures the distance using the
travel time of the radio message.
-
To
measure travel time, the GPS need a very accurate clock.
-
Once
the distance to a satellite is known, then we need to
know where the satellite is in space.
-
As the
GPS signal travels through the ionosphere and the
earth's atmosphere, the signal is delayed.
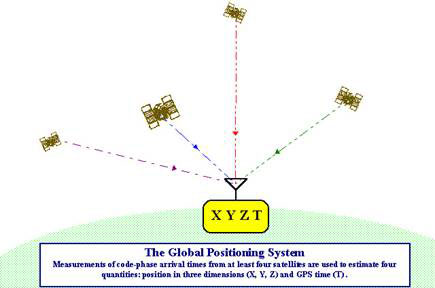
To
compute a position in three dimensions. We need to have
four satellite measurements. The GPS uses a trigonometric
approach to calculate the positions, The GPS satellites
are so high up that their orbits are very predictable and
each of the satellites is equipped with a very accurate
atomic clock.
GPS Positioning Types
Absolute Positioning
The mode of positioning relies upon a single receiver
station. It is also referred to as 'stand-alone' GPS,
because, unlike differential positioning, ranging is
carried out strictly between the satellite and the
receiver station, not on a ground-based reference station
that assists with the computation of error corrections. As
a result, the positions derived in absolute mode are
subject to the unmitigated errors inherent in satellite
positioning. Overall accuracy of absolute positioning is
considered to be no greater than 50 meters at best by
Ackroyd and Lorimer and to be + 100 meter accuracy by the
U.S. Army Corps of Engineers.
Differential Positioning
Relative or Differential GPS carries the triangulation
principles one step further, with a second receiver at a
known reference point. To further facilitate determination
of a point's position, relative to the known earth surface
point, this configuration demands collection of an
error-correcting message from the reference receiver.
Differential-mode positioning relies upon an established
control point. The reference station is placed on the
control point, a triangulated position, the control point
coordinate. This allows for a correction factor to be
calculated and applied to other roving GPS units used in
the same area and in the same time series. Inaccuracies in
the control point's coordinate are directly additive to
errors inherent in the satellite positioning process.
Error corrections derived by the reference station vary
rapidly, as the factors propagating position errors are
not static over time. This error correction allows for a
considerable amount of error of error to be negated,
potentially as much as 90 percent.
GPS Applications
One of the most significant and unique features of the
Global Positioning Systems is the fact that the
positioning signal is available to users in any position
worldwide at any time. With a fully operational GPS
system, it can be generated to a large community of likely
to grow as there are multiple applications, ranging from
surveying, mapping, and navigation to GIS data capture.
The GPS will soon be a part of the overall utility of
technology.
There are countless GPS applications, a few important ones
are covered in the following passage:
Surveying and Mapping
The high precision of GPS carrier phase measurements,
together with appropriate adjustment algorithms, provide
an adequate tool for a variety of tasks for surveying and
mapping. Using DGPs methods, accurate and timely mapping
of almost anything can be carried out. The GPS is used to
map cut blocks, road alignments, and environmental hazards
such as landslides, forest fires, and oil spills.
Applications, such as cadastral mapping, needing a high
degree of accuracy also can be carried out using high
grade GPS receivers. Continuous kinematic techniques can
be used for topographic surveys and accurate linear
mapping.
Navigation
Navigation using GPS can save countless hours in the
field. Any feature, even if it is under water, can be
located up to one hundred meters simply by scaling
coordinates from a map, entering waypoints, and going
directly to the site. Examples include road intersections,
corner posts, plot canters, accident sites, geological
formations, and so on. GPS navigation in helicopters, in
vehicles, or in a ship can provide an easy means of
navigation with substantial savings.
Remote Sensing and GIS
It is also possible to integrate GPS positioning into
remote-sensing methods such as photogrammetry and aerial
scanning, magnetometry, and video technology. Using DGPS
or kinematic techniques, depending upon the accuracy
required, real time or post-processing will provide
positions for the sensor which can be projected to the
ground, instead of having ground control projected to an
image. GPS are becoming very effective tools for GIS data
capture. The GIS user community benefits from the use of
GPS for locational data capture in various GIS
applications. The GPS can easily be linked to a laptop
computer in the field, and, with appropriate software,
users can also have all their data on a common base with
every little distortion. Thus GPS can help in several
aspects of construction of accurate and timely GIS
databases.
Geodesy
Geodetic mapping and other control surveys can be carried
out effectively using high-grade GPS equipment. Especially
when helicopters were used or when the line of sight is
not possible, GPS can set new standards of accuracy and
productivity. |




